
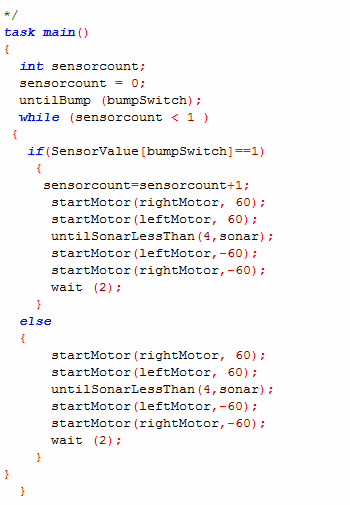
This is our final programming. Basically the wheels will go foward and then when the sonar reaches less than four it will begin to go the other way. Then when the limit switch is held on the other side and it equals 1 it will return to the other side. When the bump switch is touched and held for around 5 seconds it will do the whole program again except not in an infinite loop only once more.
